ROS 2 Quality of Service (QoS)#
Learning Objectives#
In this tutorial we will:
Setting Quality of Service (QoS) for all ROS2 OmniGraph nodes.
Quickly create a preset generic ROS2 publisher Action Graph.
Setting a static ROS2 publisher by setting a QoS Profile.
Getting Started#
Important
Make sure to source your ROS 2 installation from the terminal before running Isaac Sim. If sourcing ROS 2 is a part of your bashrc then Isaac Sim can be run directly.
Prerequisite
Completed ROS and ROS 2 Installation so that the necessary environment variables are set and sourced before launching Omniverse Isaac Sim, and ROS2 extension is enabled.
Read about Quality of Service settings.
Note
The ROS2 QoS Profile OmniGraph node has a known issue: it is unable to save custom profiles in USD unless you first set the createProfile input to “Custom” before modifying any other fields.
Setting QoS Profile for ROS 2 OmniGraph nodes#
Open a new stage.
Go to Isaac Utils -> Common Omnigraphs -> ROS2 Generic Publisher. For Generic Publisher Graph, select Publish String. Click OK.
Expand the newly created Graph prim. Select ROS_GenericPub, right click and choose Open Graph.
All ROS 2 OmniGraph nodes such as the ROS2 Publisher include a qosProfile string input. This input is formatted as a JSON string. An example of the JSON string for the default QoS settings for publishers and subscriptions is shown below.
{ "history": "keepLast", "depth": 10, "reliability": "reliable", "durability": "volatile", "deadline": 0.0, "lifespan": 0.0, "liveliness": "systemDefault", "leaseDuration": 0.0 }
Note that depth must be set as positive integer while deadline, lifespan, and leaseDuration must be set as floats in order for the JSON string to be valid.
While you can directly set the qosProfile input of any ROS 2 OmniGraph node with a valid JSON string, you can also use the ROS2 QoS Profile node to automatically generate this string and connect its output to multiple ROS 2 publisher or subscriber nodes.
In the Action Graph window, add the ROS2 QoS Profile node and connect as shown below. The createProfile input contains multiple preset QoS profiles. The other inputs are QoS policies which can be individually set to create a custom QoS profile.
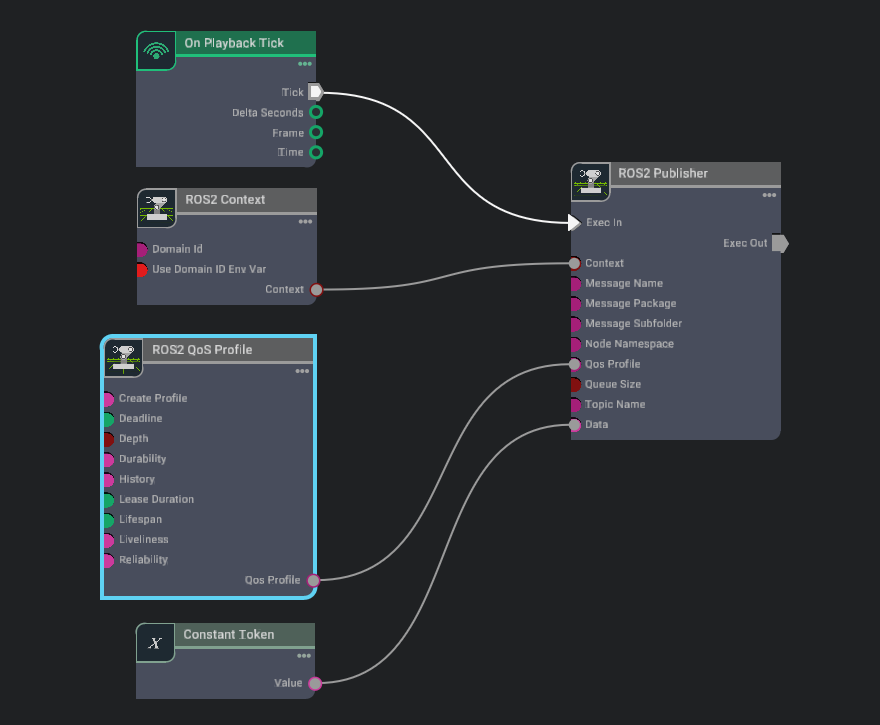
Set createProfile to Sensor Data and then click Play to start simulation.
Note
If the UI doesn’t update with new values, you may have to click outside of the node and then click on it again.
In a ROS2-sourced terminal, run the following command to retrieve the QoS settings for the topic.
ros2 topic info /topic -v
The output for QoS Profile should match the ones defined from Isaac Sim.
Note
The default Fast DDS (formerly Fast RTPS) does not store depth and therefore the depth policy will be shown as UNKNOWN. Try running Isaac Sim and ROS2 nodes using Cyclone DDS to retrieve depth info. Depth policy is only displayed in ROS 2 Humble.
Creating Static Publishers#
Note
This section of the tutorial is only supported in ROS 2 Humble.
This section assumes you have already completed the above section.
Static publishers can be useful when you publish a message exactly once but need the same message to be available regardless of how many subscribers connect to the topic.
Modify the Action Graph from earlier by adding in the On Stage Event and Countdown OmniGraph nodes as shown below:
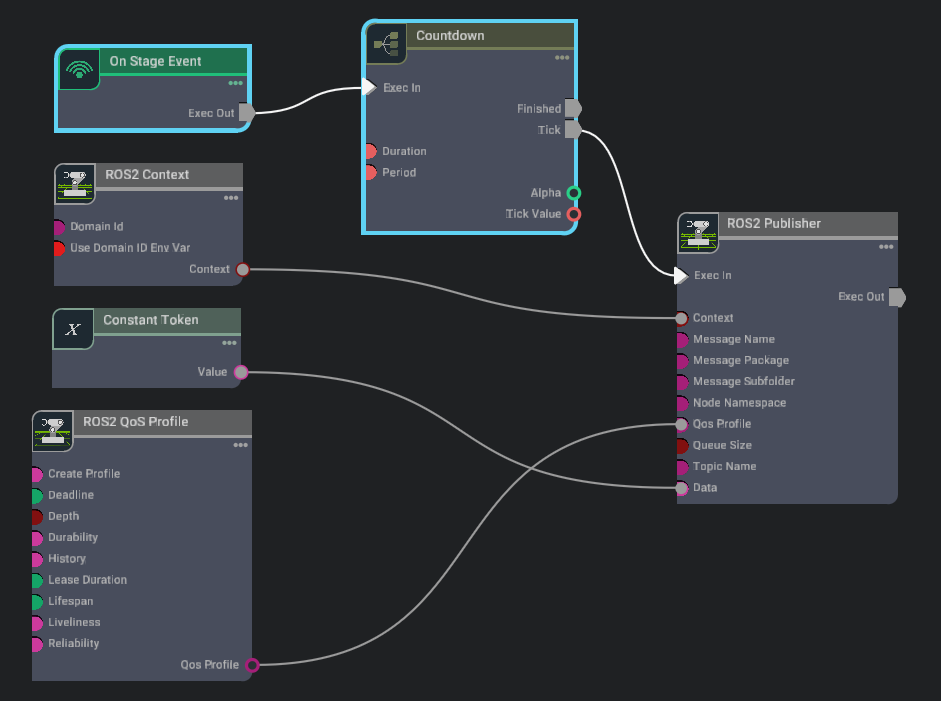
For the On Stage Event set the eventName to Simulation Start Play.
For the Countdown node, set the duration to 3 and period to 1. This will tick the ROS2 Publisher node 3 times after simulation is played. For the ROS2 Publisher node, the first 2 frames are used for setup and the 3rd frame publishes a message.
Select the ROS2 QoS Profile node and set createProfile to Default for publisher/subscribers.
Then, set depth policy to 1 and durability policy to transientLocal.
Hit Play to start simulation.
In a new ROS2-sourced terminal run the command once to view the static message
ros2 topic echo /topic
In another ROS2-sourced terminal repeat step 5 and notice the static message appear again for this second subscriber.
Summary#
This tutorial covered:
QoS Profile Node.
Setting Quality of Service (QoS) for all ROS2 OmniGraph nodes.
Setting a static ROS2 publisher using a custom QoS Profile.
Next Steps#
Continue on to the next tutorial in our ROS2 Tutorials series, ROS2 Navigation to learn to use ROS2 Nav2 with Omniverse Isaac Sim.