Using Sensors: Ultrasonic#
Warning
The ultrasonic sensor is deprecated and will be removed in the in a future release.
Learning Objectives#
This tutorial introduces how to use an Ultrasonic sensor for sensing an environment in Omniverse Isaac Sim. After this tutorial, you will know how to add an Ultrasonic sensor to the scene, activate, and detect objects in simulation.
5-10 Minute Tutorial
Getting Started#
Prerequisites
Review the Core Tutorial series prior to beginning this tutorial.
This tutorial demonstrates how to integrate LIDAR sensors into an Omniverse Isaac Sim simulations. It shows how to set different Ultrasonic properties in the Property panel, and how to plot readings from the sensor.
Let’s begin setting up the scene by opening the Ultrasonic Example extension:
Go to the top menu bar and click Isaac Examples > Sensors > Ultrasonic.
Press the Open Source Code button to view the source code. The source code illustrates how to add and control the sensor using the Python API.
Press the
Load Sensorbutton.Press the
Load Scenebutton.Press the
PLAYbutton to begin simulating.
This example creates an ultrasonic sensor with obstacles in the scene.
Flickering white lines show the
UltrasonicFiringGroupsbeams being fired at different times.Blue lines show where the sensor’s beams are hitting obstacles.
Adjust Sensor Properties#
The Ultrasonic Sensors properties are held by the UltrasonicArray prim. Select this prim from the Stage
to investigate these properties further.
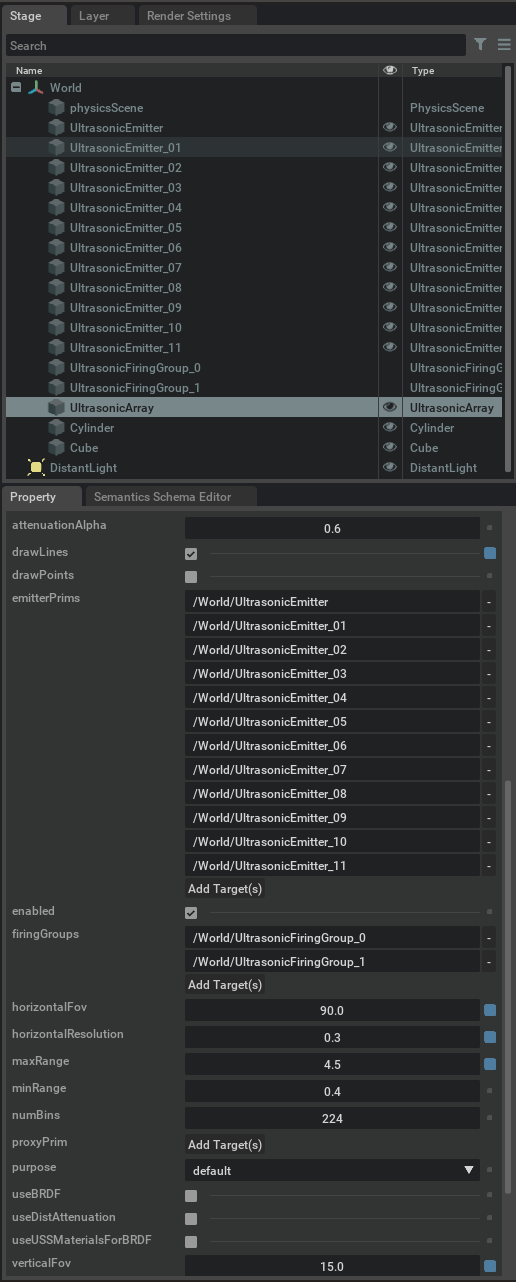
Once selected, the UltrasonicArray’s Property panel populates with the many useful parameters, such as
the number of emitters, firing groups, resolution, number of bins per Ultrasonic Sensor envelope.
The envelope specifies the range in which an emitter is shooting beams out.
horizontalFov and verticalFov control the size of the envelope.
minRange and maxRange specify the distance range of the emitter.
numBins divides minRange to maxRange distance.
drawLines and drawPoints visualize useful debugging information.
useBRDF and useDistAttenuation will affect hit intensities.
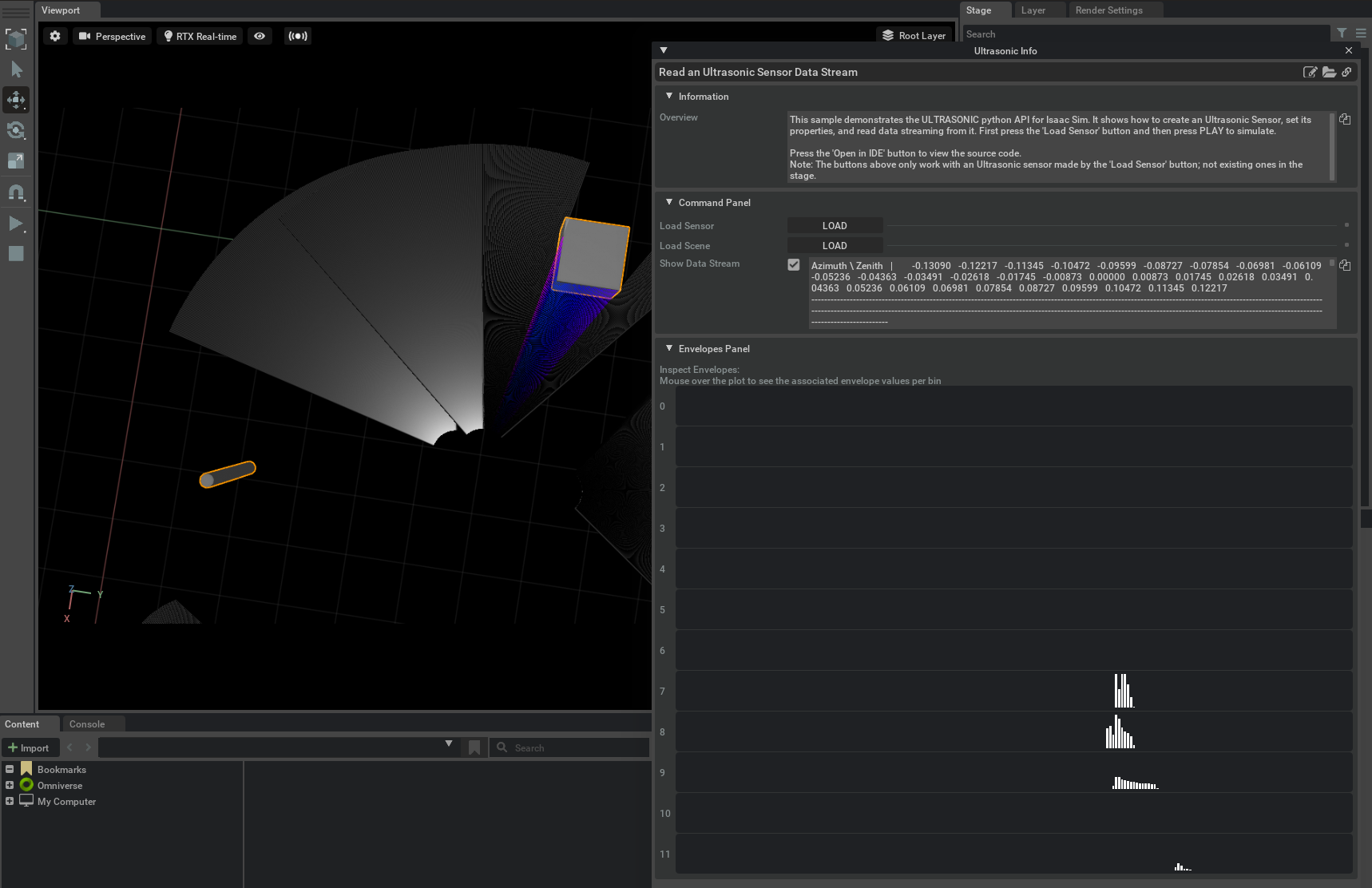
Mouse over the white bars in the Example window to see which emitters are hitting the obstacle and how far away they are.
Summary#
This tutorial covered the following topics:
Using Ultrasonic Sensors
Next Steps#
See the other Sensor tutorials in our Advanced Tutorials section, Using Sensors: LIDAR, to learn how to integrate additional range sensors into Omniverse Isaac Sim.
Further Learning#
For a more in-depth look into the concepts covered in this tutorial, please see the following reference materials:
Range Sensors
See the Range Sensor Extension (Lidar, Ultrasonic, Generic Range) Manual for full implementation details.
See the Range Sensor API Documentation for additional usage information.