Attention
This documentation is for Isaac Sim 4.2.0.
Proceed to Isaac Sim 4.5.0 Documentation for the latest updates.
What Is Isaac Sim?#
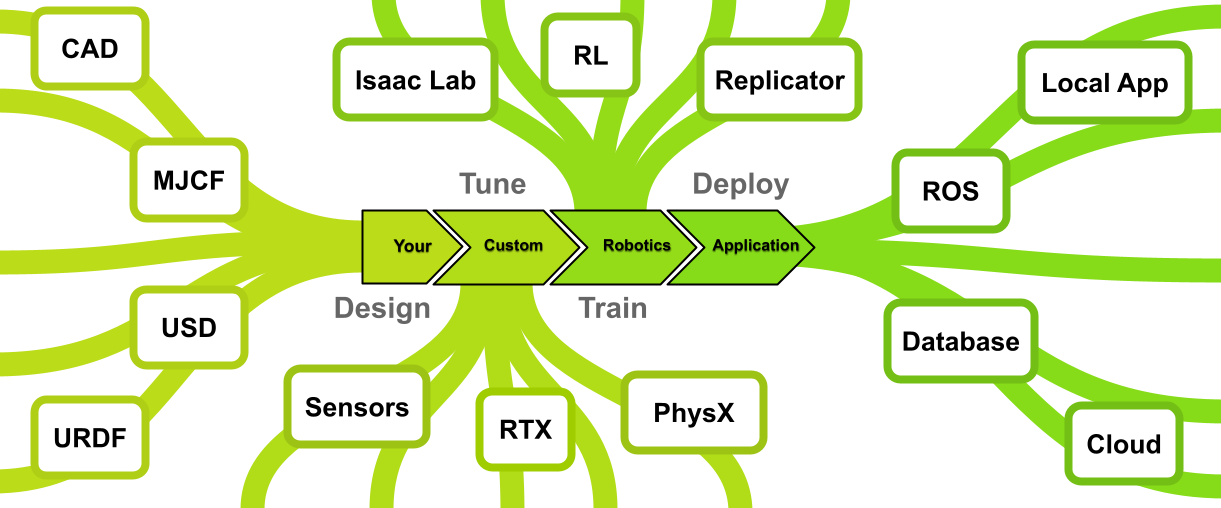
Isaac Sim is a software platform built from the ground up to support the increasingly roboticized and automated world. The goal is to make it as easy as possible for you to design, tune, train, and deploy autonomous control agents for real, physical robots.
Design#
Isaac Sim comes with a collection of workflows for importing and tuning mechanical systems designed in the most common formats including Onshape, the Unified Robotics Description Format (URDF), and the MuJoCo XML Format (MJCF). This is made possible through the use of the Universal Scene Description (USD), an easily extensible, open source 3D scene description API that serves as the unifying data interchange format at the heart of Isaac Sim.
Tune and Train#
The core functionality of Isaac Sim is the simulation itself: a high fidelity GPU based PhysX engine, capable of supporting multi-sensor RTX rendering at an industrial scale. Isaac Sim’s direct access to the GPU enables the platform to support the simulation of various kinds of sensors including cameras, LiDAR, and contact sensors. This in turn facilitates the simulation of digital twins, allowing your end-to-end pipelines to run before ever needing to turn on a real robot. Isaac Sim provides a suite of tools for collecting synthetic data with Replicator, orchestrating simulated environments through Omnigraph, tuning PhysX simulation parameters to match reality, and finally training control agents through various methods like Reinforcement Learning (RL) with Isaac Lab.
Deploy#
Isaac Sim comes pre-equipped with all of the components necessary to not only deploy agents to real robots, but also build applications that are fully integrable with such systems. Omniverse provides APIs for app infrastructure including GUI creation and file management. Omniverse Nucleus allows users to construct their own cloud, unlocking the ability to create collaborative apps using live sync and data hosting. The Isaac Sim platform also provides bridge APIs to ROS and ROS2, for direct communication between live robots and the simulation, as well as NVIDIA Isaac ROS, a collection of performant, hardware accelerated ROS 2 packages for making autonomous robots.
Useful API links#
Useful Manuals#
Getting Started#
Workstation Installation: Installation guide for a local workstation.
Container Installation: Installation guide for a remote headless server.
Introductory: The fundamentals of working in Omniverse Kit and different workflows in Omniverse Isaac Sim.
GUI: The fundamental concepts of robotics in Omniverse Isaac Sim via GUI.
Development Tools: The tools and environments for debugging and development.
Core API: Building environments, robots, and tasks using Omniverse Isaac Sim Core Python APIs.
Scene setup: Importing and modifying robots and manipulators from external sources.
Motion Generation: Lula motion generation library.
ROS/ROS2: Examples of various ROS and ROS2 bridges and interfaces.
Mapping: Occupancy map generation.
Isaac Lab Tutorials: Reinforcement learning framework and Cloner APIs.
Replicator Tutorials: Synthetic data generation.
Isaac Cortex Tutorials: High level behavioral programming.
System Architecture#
The purpose of Isaac Sim is to support the creation of new robotics tools and empower the ones that already exist. The platform provides a flexible API for both C++ and Python and can be integrated into a project to varying degrees depending on your needs. The goal of the platform is not to compete with current or existing software, but to collaborate with and enhance it. To this end, many components of Isaac Sim are open source, and freely available for independent use. You may want to design your robot in OnShape, simulate its sensors with Isaac Sim, and control the stage through ROS or some other messaging system. Likewise, it is also possible to build a complete, stand alone, application entirely on the platform provided by Isaac Sim!
Omniverse Kit#
Isaac Sim uses the Omniverse™ Kit, a toolkit for building native Omniverse applications and microservices. Omniverse Kit provides a wide variety of functionality through a set of light-weight plugins. Plugins are authored with C interfaces for persistent API compatibility; however, a Python interpreter is also provided for accessible scripting and customization.
The Python API can be used to write new extensions to Omniverse Kit or new experiences for Omniverse.
Development Workflows#
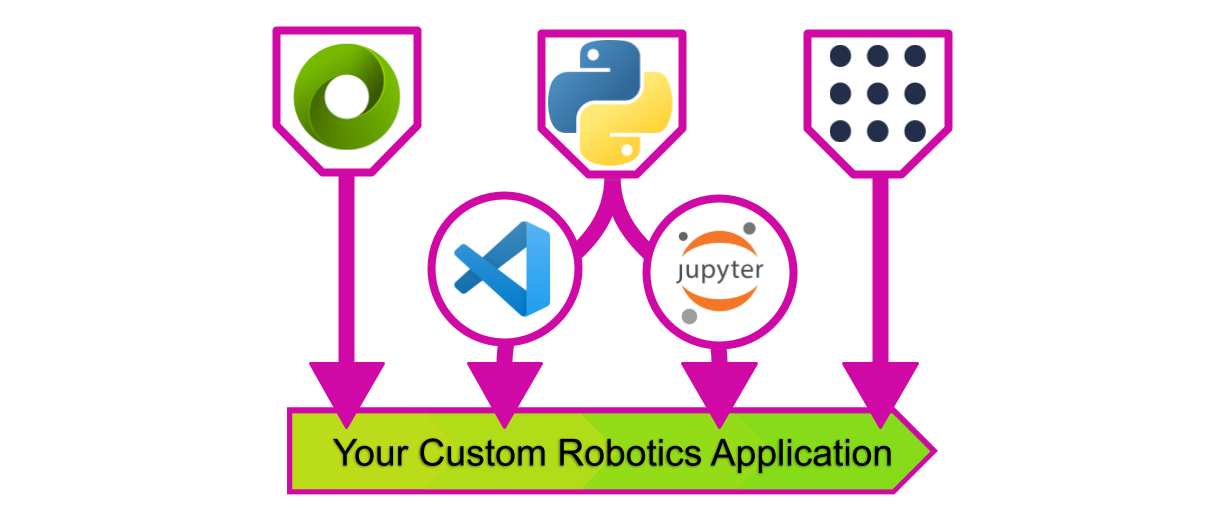
Isaac Sim is built on C++ and Python, and operates most commonly through the use of compiled plugins and bindings respectively. This means the platform is capable of supporting a wide variety of workflows for building and interacting with projects that make use of Isaac Sim. Isaac Sim comes with a full, stand alone, Omniverse application for interacting with and simulating robots, and while this is the most common way users interact with the platform, it is by no means the only method. Isaac Sim also provides direct Python development support in the form of extensions for VS Code and Jupyter Notebooks. Isaac Sim is not limited to synchronous operation either, and can operate with hardware in the loop through ROS and ROS2, facilitating sim-to-real transfer and digital twins.
USD#
Omniverse Isaac Sim uses the USD interchange file format to represent scenes. Universal Scene Description (USD) is an easily extensible, open-source 3D scene description and file format developed by Pixar for content creation and interchange among different tools. Because of its power and versatility, USD is being adopted widely, not only in the visual effects community, but also in architecture, design, robotics, manufacturing, and other disciplines.
For a more in-depth look at USD in Omniverse, see the NVIDIA USD primer What is USD?.
See the USD API docs for more details.
see the NVIDIA USD API for our python wrappers around USD.
See the USD Glossary of Terms & Concepts for more details.
See the NVIDIA USD tutorials for a step-by-step introduction to USD.