Camera#
If a mutable has an attribute type of camera, it’s a camera. Typically, a simple pinhole camera model is used.
Required attributes of a camera:
Name |
Type |
|---|---|
camera_parameters |
dict |
camera_parameters is a dictionary with the following six required keys:
Name |
Type |
|---|---|
screen_width |
int |
screen_height |
int |
focal_length |
numeric |
horizontal_aperture |
numeric |
near_clip |
numeric |
far_clip |
numeric |
Pinhole Model#
3D objects are projected onto a 2D plane, like this:
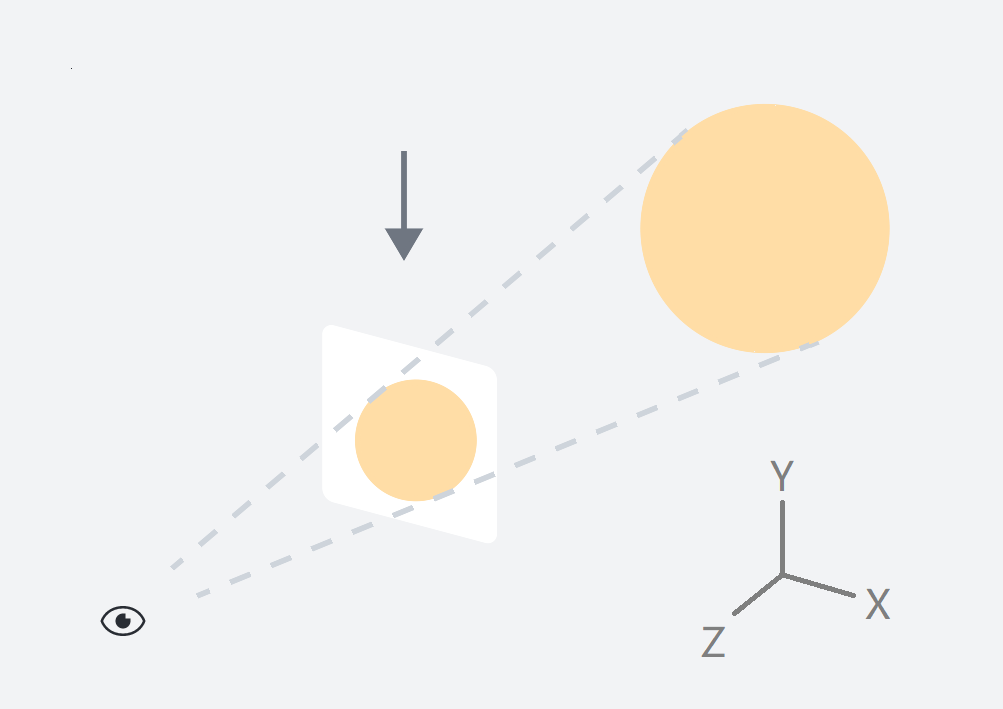
Looking from a top view, towards the negative Y-axis:
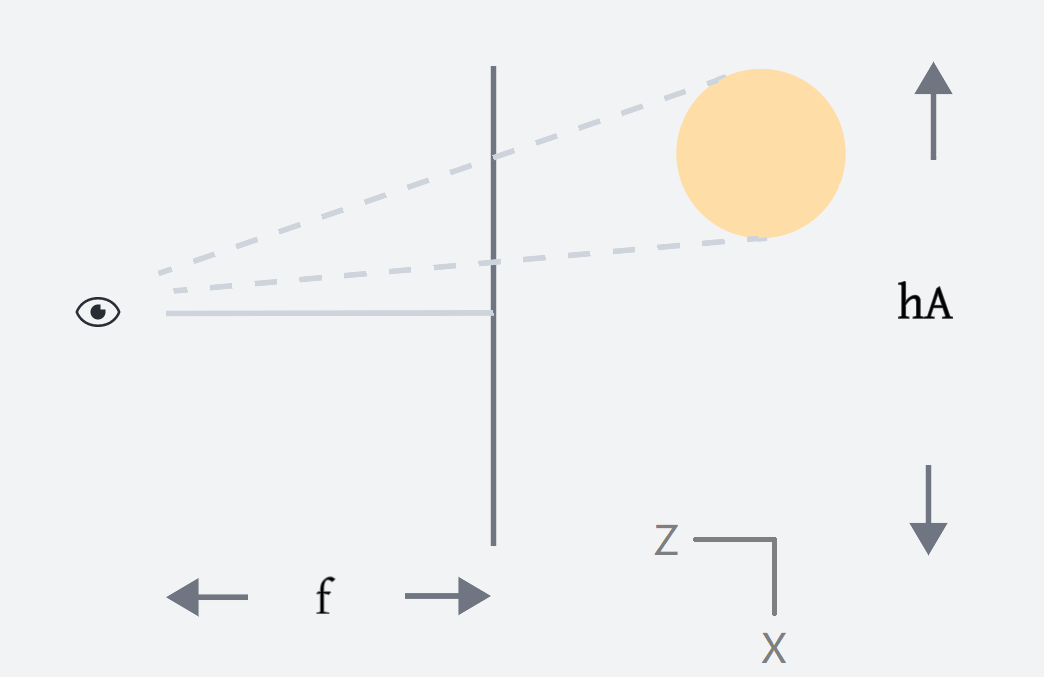
In the picture, f, which is the distance from the camera to the projection plane, is focal_length. hA is the distance from the left edge (upper end) to the right edge (lower end) and stands for horizontal_aperture.
near_clip and far_clip define two planes perpendicular to the line of vision between which you can see things.
Assumptions#
The following assumptions are made in frame of reference and conversion from/to other common representations.
If no transform operator is applied on the camera, the Y-axis points upwards and X-axis points to the right. The camera looks towards negative direction of the Z-axis.
There are many standards out there for the pinhole camera. To avoid confusion, we define a value called the \(pinholeRatio\) such that \(pinholeRatio=\frac{2∗focalLength∗aspectRatio}{horizontalAperture}\)
If you are familiar with OpenGL/Direct3D, \(fovy\) is used more often.
If you are familiar with the intrinsic matrix or the Objectron standard, \(fx, fy, cx, cy\) are used.
Here, \(aspectRatio = screenWidth/screenHeight\).