Writer Control#
Overview#
Omni.Replicator.Agent (ORA) provides built-in writers as well as the ability for you to create your own custom writers.
Built-in Writers#
Tao Writer#
Overview#
TaoWriter is a writer that publishes aligned images with detected character data. It produces RGB images from camera, corresponding labels with 2d bounding box, 3d bounding box and segmentation data on people. The labels from TaoWriter will have bounding box coordinates for each character in the scene and follow Kitti 3D annotations format.
Parameters#
Tao Writer expose the following parameters:
rgb: control whether RGB annotator is outputbbox: control whether character data is output, including 2d bounding box, 3d bounding box, and joint position character datasemantic_segmentation: control whether semantic segmentation is outputvideo: control whether to generate a video from the RGB images (ffmpeg must be installed on the system)
Output#
Rgb: Current Frame’s render product from camera’s viewport
Colored Semantic Segmentation: every character is colored with a distinguishing color
Character Information
For each character that passes the width/height threshold checking, TAO Writer outputs the following data:
Semantic label: character’s semantic label
2d tight bounding box: x_max, x_min, y_max, y_min
2d loose bounding box: x_max, x_min, y_max, y_min
Character 3d position: character’s position in the Isaac Sim Omniverse space
Character joint information
Joint Order: [‘Pelvis’, ‘Head’, ‘Left_Shoulder’, ‘Left_Elbow’, ‘Left_Hand’, ‘Right_Shoulder’, ‘Right_Elbow’, ‘Right_Hand’, ‘Left_Thigh’, ‘Left_Knee’, ‘Left_Foot’, ‘Left_Toe’, ‘Right_Thigh’, ‘Right_Knee’, ‘Right_Foot’, ‘Right_Toe’]
3d_joint_position: for each joint output its translate in x, y, z position
2d_joint_position: for each joint output its 2d position on the screen
Character 3d bounding_box information
3d bounding box scale: scale value in x, y, z
3d bounding box camera space location: bounding box location in camera space
3d bounding box rotation in degree in camera space
3d bounding box’s vertexes’ 2d projection on screen
Video: If the the video option is checked, it uses ffmpeg to generate a video from the output images
Objectron Writer#
Overview#
Objectron writer outputs a 3D label file in JSON format. This ground truth file is useful for training 3D object detection models or 6-DoF pose estimation. Each file records the camera poses, as well as the 3D bounding boxes of the objects of interest, both in the 2D image plane and the 3D camera space. Additionally, it includes the pose and class of each object.
Parameters#
Objectron Writer provides the following parameters:
rgb: controls whether RGB annotator is outputbbox: controls whether character data is output, including 3d bounding boxes’ scale, camera space rotation, and camera space translationsemantic_segmentation: controls whether semantic segmentation is outputdistance_to_camera: controls whether the depth image is output
Output#
Rgb: The current frame’s render product from the camera’s viewport
Colored Semantic Segmentation: every character is colored with distinguish color
Distance to the Camera: Depth
Camera Information:
Camera Projection Matrix: camera projection matrix
Camera View: camera view matrix
Camera Intrinsic Data cx, cy, fx, fy
Viewport Width/Height
Camera’s tranlation: x, y, z in Isaac Sim coordinates
Camera’s rotation in quaternion xyzw
Character Information
For each character that passes the width/height threshold checking, the TaAO Writer outputs the following data:
Semantic label: character’s semantic label
Character_3d_bounding_box information:
3d bounding box camera space location: bounding box location in camera space
3d bounding box rotation in camera space: quaternion xyzw format
3d bounding box’s vertexes’ 2d projection on screen
3d bounding box’s vertexes’ 3d position in camera space
RTSP Writer#
Overview#
RTSPWriter is a custom writer that publishes annotations of attached render products to an RTSP server. It tracks a dictionary of render products (HydraTexture) by the combo of the annotator name and the render product’s prim path. Each render product is recorded as an instance of RTSPCamera. The published RTSP URL of each RTSPCamera instance is constructed by appending the render product’s camera prim path and the annotator name to the base output directory.
Annotators#
These annotators are supported:
LdrColor / rgbsemantic_segmentationinstance_id_segmentationinstance_segmentationDiffuseAlbedoRoughnessEmissionAndForegroundMaskdistance_to_cameradistance_to_image_planeDepthLinearizedHdrColor
Parameters#
RTSPWriter accepts the following parameters:
annotator: a string variable that specifies the annotator of all attached render products to be streamed. The accepted value is LdrColor / rgb, semantic_segmentation, instance_id_segmentation, instance_segmentation, HdrColor, distance_to_camera, or distance_to_image_plane. The string value must be exact.output_dir: a string variable that specifies the base RTSP URL in the form ofrtsp://<RTSP server hostname>:8554/<base topic name>. Given a render product and the annotator, the full RTSP URL is formatted asrtsp://<RTSP server hostname>:8554/<base topic name>_<camera prim path>_<annotator>. For example, if the RTSP server hostname ismy_rtsp_server.com; the base topic name isRTSPWriter; the camera prim path is/World/Cameras/Camera_01; the annotator isrgb, then the full RTSP URL isrtsp://my_rtsp_server.com:8554/RTSPWriter_World_Cameras_Camera_01_LdrColor.
Instructions#
Before RTSPWriter can stream camera viewports in Omniverse, the following steps are required:
Install and start an RTSP server
The Writer sends all streams to the same RTSP server. The server can be local. One candidate of RTSP server is MediaMTX. To install and start a Linux version of such a server:Download and extract a standalone binary from the release page
mkdir mediamtx; cd mediamtx wget https://github.com/bluenviron/mediamtx/releases/download/v1.1.1/mediamtx_v1.1.1_linux_amd64.tar.gz tar xvzf mediamtx_v1.1.1_linux_amd64.tar.gz
Start the server:
./mediamtx
Install FFmpeg
Install FFmpeg on the same machine where RTSPWriter is executed from.
sudo apt update && sudo apt install -y ffmpegRegister and initialize RTSPWriter
As an example, the following code snippet prepares to send the
rgbor equivalentlyLdrColorannotators of the render products tortsp://<RTSP server hostname>:8554. The base topic name isRTSPWriter. The full topic name of the RTSP stream is constructed asRTSPWriter_<camera prim path>_<annotator>. If the annotator data format is supported by NVENC, the raw frame buffers encoding of the render product is performed on one dedicated GPU device. If there are 8 render products and 4 visible GPU devices, every GPU encodes 2 render product frame buffers.import omni.replicator.core as rep ... render_products = [] render_products.append(rep.create.render_product(...)) ... render_products.append(rep.create.render_product(...)) ... writer = rep.WriterRegistry.get("RTSPWriter") writer.initialize(annotator="rgb", output_dir="rtsp://<RTSP server hostname>:8554/RTSPWriter") writer.attach(render_products)
Assume the camera prim path of a render product is /World/Cameras/Camera_01, the full topic name of the RTSP stream is RTSPWriter_World_Camera_01_LdrColor.
Custom Writers#
ORA supports using custom writers created by you, through the UI or config file directly.
To enable it from UI, select Custom from the dropdown of the Replicator Setting panel, enter the writer’s name and its input parameters in the text boxes.
To enable it from config file, put the writer’s name and parameters in the
replicatorsection.
ORA obtains the writer using the writer’s name from the Replicator extension, so writers are expected to be registered in the Replicator beforehand. For writers mentioned above (provided by ORA), they are registered when ORA is loaded. Other custom writers must be registered by you. Follow the Custom Writer documentation to create and register custom writers.
Notes#
Width/Height Threshold Checking#
To make sure characters are not mostly occluded, we apply the following test to select valid characters.
We define two conditions for whether a character should be labeled, visibility in height and visibility in width. See the images for more details.
For occluded characters (characters that are blocked by an object within the camera frame), characters must satisfy both the visibility in height and width requirements.
For truncated characters (characters that are cut off by the camera frame), characters must satisfy visibility for height OR the visibility for width.
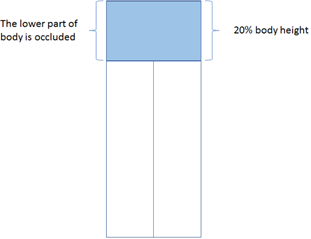
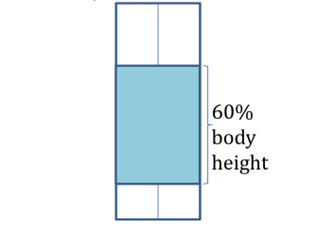
Visibility in height
If the head is visible and 20% of the height is visible then this condition is met
If the head is not visible and 60% of the height is visible, this condition is met
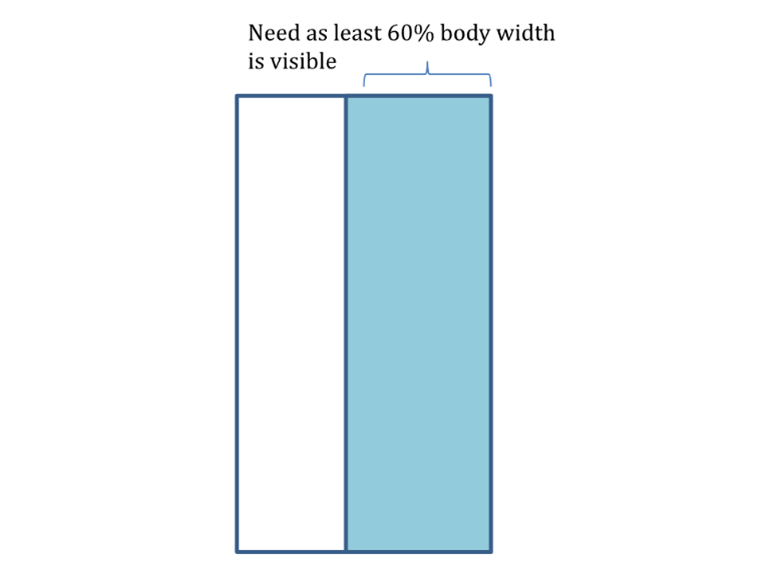
Visibility in width
If more than 60% body width is visible, then this condition is met