USD to URDF Exporter#
Overview#
The USD to URDF exporter is a tool to convert USD files to URDF. A user just needs to open a stage with the desired USD to export and provide the path to directory where the new URDF file will be saved, or the path to the new URDF file directly. Alternatively, a user can explicitly proved the path the the USD file to export.
To enable this extension, go to the Extension Manager window by navigating to Window > Extensions, and enable omni.exporter.urdf.
Mesh files default to saving into a meshes directory, which is placed in the same directory as the new URDF file. Additional options are available that allow you to customize some parts of the conversion.
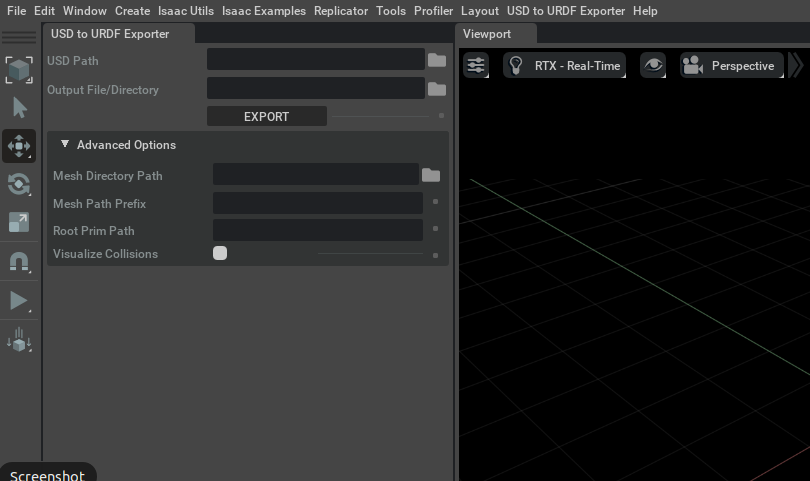
USD Path#
The operating system path to the USD file that you want to export. Defaults to using the current stage.
Output File/Directory#
The path (and name) for the new URDF file.
The file path conventionally ends with the extension .urdf.
Or a directory path, the new URDF file will be saved to that directory and will have the same name as the USD.
Mesh Directory Path#
The directory where the meshes will be saved for the URDF (defaults to the same directory as the as where the URDF file is saved).
Mesh Path Prefix#
A prefix to apply to each mesh filename.
For example, to set the mesh file paths to valid URI with the file scheme set this to file://.
Root Prim Path#
The root prim within the USD stage of the kinematic tree to be exported to URDF. The default is the default prim of the the USD file.
Visualize Collisions#
If set, the collision meshes are included as visual meshes in the resulting URDF.